CIRCBot
Part 4: Serial, Sonar and Servos
This project accompanies Part 4 of Servo Magazine's series,
Beginner's Robotics on $50 a Month. It covers serial
communications, controlling servos and determining distances using Sonar.
The first part of the article can be found in the February issue of Servo
Magazine.
The Part 4 kit is available here.
Serial Communications
This month, we will use serial communications to
pass commands and data between two ATMega48 microcontrollers. Serial
communications is a commonly used with microcontrollers; between a PC and
the microcontroller and/or between a microcontroller and peripheral
devices. Serial uses 2 wires for communication plus a common ground. The
transmit line (TX) from the first microcontroller is connected to the
receive line (RX) of the second and the transmit line (TX) of the second
microcontroller is connected to the receive line (RX) of the first.
For our use, we will call our first microcontroller the primary or hub and
the new microcontroller we added will be called the secondary or
spoke.
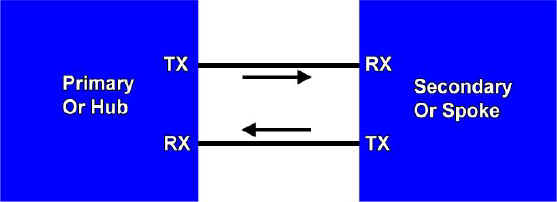
Figure 1 - Serial Communication
Data is always sent from the TX port to the
RX
port. Since both devices have a TX port and an RX port,
communications are bi-directional (two-way).
Processor Speed and Serial
Communications
By default, the Mega48 microcontroller is
running at 1MHz. At this speed, any BAUD rate over 4800 has a high error
rate. We are using 9600 BAUD so we have to change the speed the processor is
running. Changing the speed requires changing the microcontroller's fuse
bits.
A word of caution - setting the
fuse bits incorrectly can cause the microcontroller to stop functioning. Do
not change fuse bits unless you understand their purpose. If this happens,
please email support@wrighthobbies.net
for assistance.
Fuse bits are special settings that tell
the microcontroller how to behave at the hardware level. Fuse bits control
the processor frequency, the source of the clock signal, enabling brown out
detection and protecting the firmware from changes. To change the
frequency from 1MHz to 8MHz requires one fuse bit and one line of code
to be changed.
First, let's change last month's code.
Open CIRCBot_sensors_v2a.bas and look at the 10th line:
$crystal = 1000000
Change it to:
$crystal =
8000000
Click on Program/Compile from the
menu. The program should compile without errors and is ready to be loaded
into the microcontroller. Follow the same procedures for loading the
code outlined in the previous articles.
|
